Iteration 0 overview

A few months passed since the start of our energy harvester project and, given our limited project time, we’re making a steady progress. Implementing a new product in a new domain introduces technological uncertainties, and therefor, we proposed a top-down, bottom-up development approach which is part of an iterative engineering process.
At the system level (top-down approach) we defined a set of stakeholder requirements and introduced them into the charge controller’s system requirements with the help of domain knowledge and application information. Those requirements were then mapped on the system architecture which is our high-level design proposal. The logic hardware design, a refinement of the system architecture, did show a high-level conceptual charge controller design.
In both hardware and software disciplines we did follow the bottom-up approach as well. From the hardware side, we did a basic experiment with a dump load which will be important for the system safety and investigated the relay.
From the software side, our toolchain is ready, we defined some development facilitators and we did introduce our Simple Platform Abstraction. Some basic applications are running on a variety of development boards.
Review of iteration 0 and start of iteration 1
But we’re still missing some – mainly pm-related – tasks:
- What about the project planning?
- What’s the focus of next iteration?
- What are the risks? And how to mitigate them?
Risk list
At this very moment we can only identify one major risk: the high power we are dealing with in combination with our basic hardware knowledge. In order to mitigate this risk, we plan to hire a hardware engineer who’s going to assist us with design choices. Also, we’re going to ask him to develop some some boards for us (such as sensor boards etc.). This action item will be initiated in iteration 1.
Short-term planning: focus of next iteration
We believe that a complete and stable software platform will allow us to develop our application faster. In iteration 0 we introduced Simple Platform Abstraction, now we’re going to extend it with:
- GPIO for reading and writing digital I/O
- ADC for analogue measurements
- PWM to emulate ‘analogue’ outputs with a digital wave
- a few libraries/abstractions for e.g. LEDs (“We want status LEDs!”), Buttons etc.
Of course, we know we need these extensions for sensing, actuating and testing.
From the hardware side we need assistance from an hardware engineer, especially since we’re dealing with an high-power application (see risk list). Next iteration:
- we need to find one 😉
- we want him to review our current logic hardware design
- we want to initiate the development of a sensor board for the wind turbine input.
We’ll have no doubt that the work load is sufficient for this very one iteration 🙂
Long-term planning
When the software platform is ready, our focus will shift to
- improving the system and hardware design,
- implementing (parts of) the hardware,
- starting with and improving the charge controller application.
We expect our iterations to be 2 months and – as mentioned in our Blog Strategy – we do our best to keep our blog in sync with the development… So, at the end of 2013 (6 iterations of 2 months) we hope to have a rudimentary prototype. This prototype then will be the basis for continuous improvement.
The planning is quite high-level and there are several blank cells. This is perfectly fine: we don’t want to change the planning each week, and there always will be work to fill up the blanks.
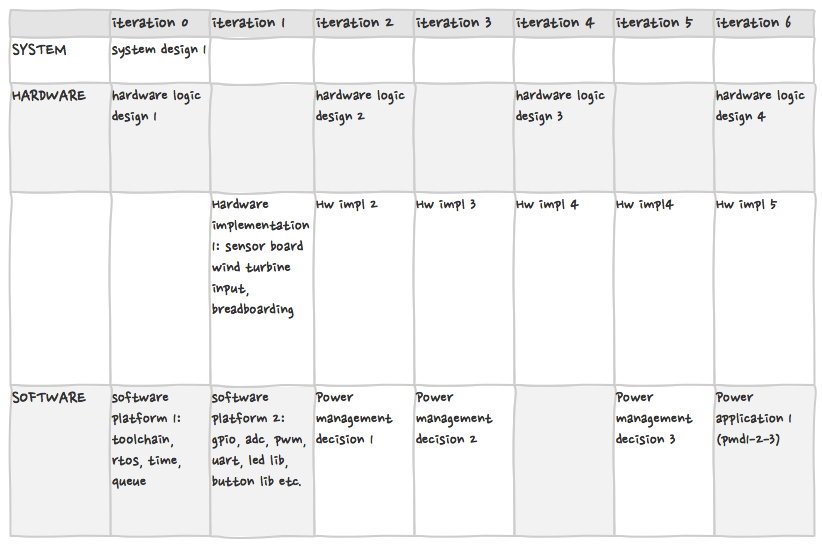
Energy Harvester Planning 1

Speak Your Mind